 服务热线:13903053897
服务热线:13903053897
服务热线:13903053897

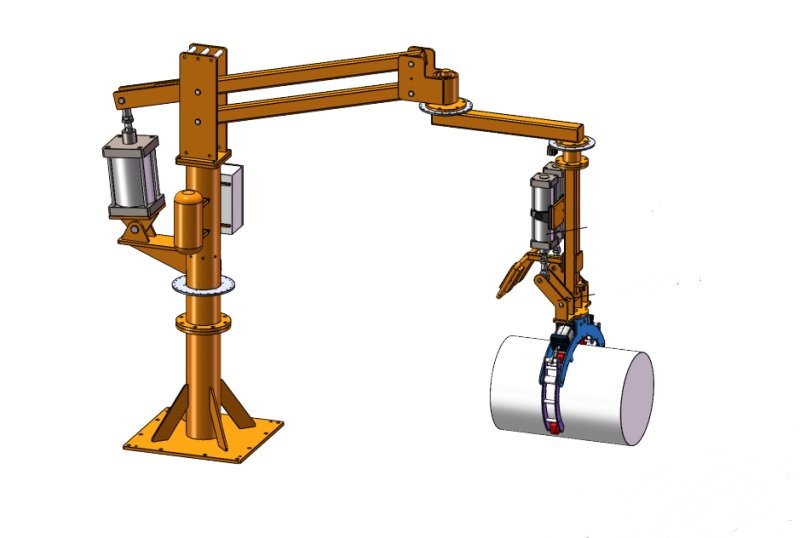
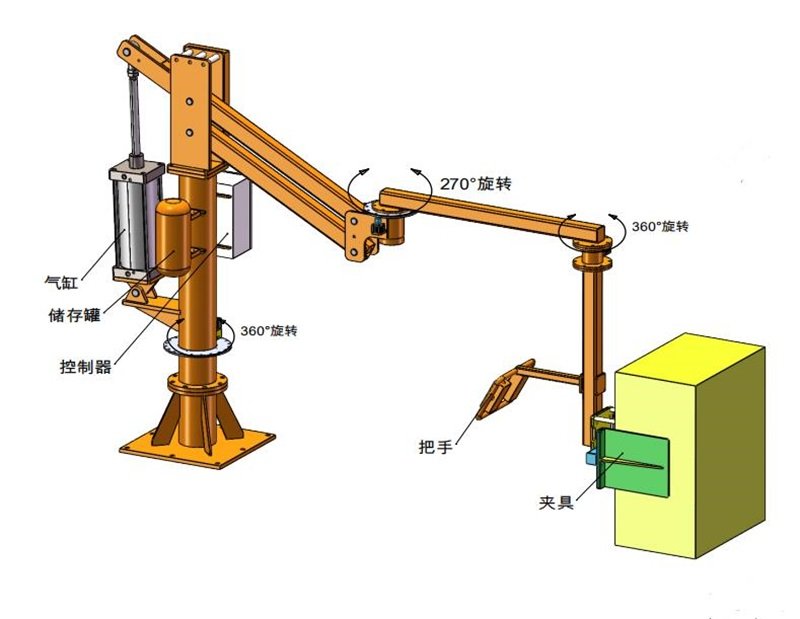

助力机械手描述:助力臂主体配有储气罐,可在断气情况下继续使用一个循环,防止工件下降。并设有安全系统,安全上采用双放措施,非没有放置到安全位置不能释放。操作控制方式采用空载平衡和按键UP/DOWN。
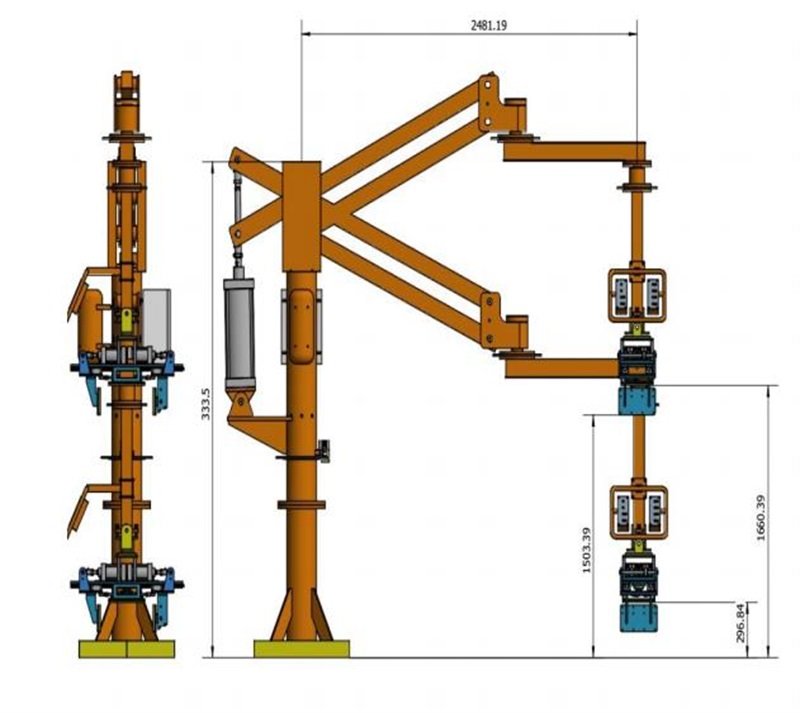
一、 设备基本参数
1、地面立柱式;
2、压缩空气:0.5-0.7 MPa;
3、工作动力:压缩空气;
4、关于设备零部件要求,选择品牌的质量相同或者高于以下推荐品牌的零部件质量;
5、设备的整体美观牢固,外观设计需保持美观一致
6、设备logo、铭牌等信息后期统一确定;
7、产品在整个流转过程中无损伤。
3.3设备功能说明
助力机械手描述:助力臂主体配有储气罐,可在断气情况下继续使用一个循环,防止工件下降。并设有安全系统,安全上采用双放措施,非没有放置到安全位置不能释放。操作控制方式采用空载平衡和按键UP/DOWN。
3.4设备工作流程:
工件信息:
产品尺寸信息最大长度950mm,宽度210mm,最大重量500kg,
工艺操作流程:
a)人工将硬臂助力机械手吸盘移至工件附近,吸住工件,按下操作按钮上升,移动到指定位置后按键下降,放置后取出吸盘,后续重复上一个的操作循环。
b)人工操作移动助力机械手空载时出于悬浮平衡状态可以拉动随行,各旋转部位为机械结构,拉动随行,负载后需按键控制上下。
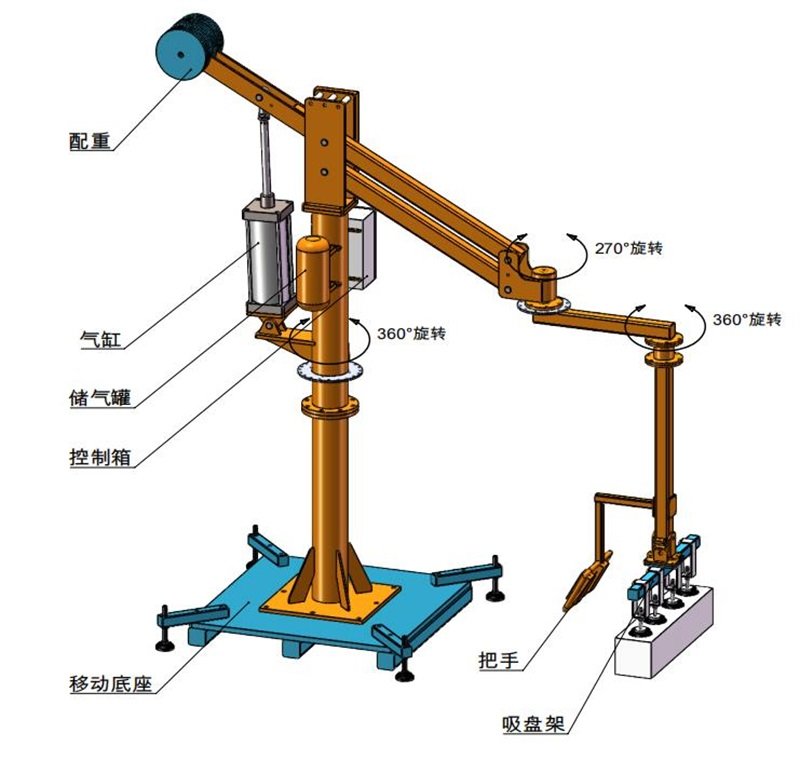
3.5主要组件:
a) 助力臂主体
b) 气动夹具系统
c) 气路控制系统
d) 安全系统
3.6设备要求:
3.6.1 完成取放料功能;
3.6.2 夹持方式:吸盘;
3.6.3 三关节旋转,满足模组360度放置,主关节与次关节配置关节锁定装置,实现机械手的锁定,避免不工作时机械臂的随意摆动;
3.6.4 吸盘可以长宽方向调节,便于对位工件;
3.6.5 单次取放时间≤30s;
3.6.6 断气保护功能,断气后,防工件跌落功能;
3.6.7 控制按钮和夹具集成一体,方便工件定位;控制部分、操作把手等符合人机工程学原理,便于操作时紧急情况的处理;